Linearize Engine Speed Model
This example shows how to linearize an engine speed model for multiple output conditions.
Engine Speed Model
Open the model.
mdl = 'scdspeed';
open_system(mdl)
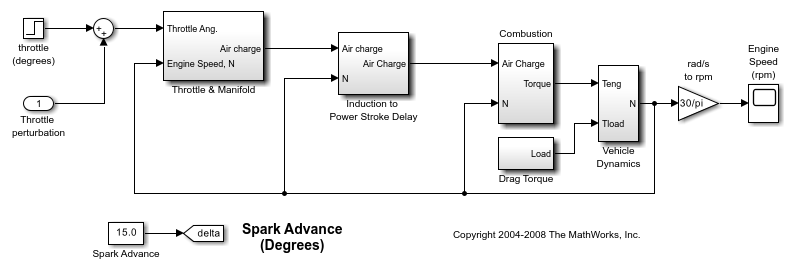
For this example, you find linear models from the spark advance and throttle angle inputs to the output engine speed. You do so for three speed conditions: 2000, 3000, and 4000 rpm.
Find Operating Points
Create an array of three operating point specifications.
opspec = operspec(mdl,[3 1]);
Since the Simulink® model does not have any root-level inports, opspec does not contain any output specifications. You can add output specifications for a given signal in your model using the addoutputspec function.
Add an output specification to the output of the rad/s to rpm block.
opspec = addoutputspec(opspec,'scdspeed/rad//s to rpm',1);
For each specification, indicate that the output value is known and specify the output value. Set the known speed values to 2000, 3000, and 4000 rpm.
opspec(1).Outputs.Known = 1; opspec(1).Outputs.y = 2000; opspec(2).Outputs.Known = 1; opspec(2).Outputs.y = 3000; opspec(3).Outputs.Known = 1; opspec(3).Outputs.y = 4000;
View the specifications object for the third operating condition.
opspec(3)
ans =
Operating point specification for the Model scdspeed.
(Time-Varying Components Evaluated at time t=0)
States:
----------
x Known SteadyState Min Max dxMin dxMax
___________ ___________ ___________ ___________ ___________ ___________ ___________
(1.) scdspeed/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
0.543 false true -Inf Inf -Inf Inf
(2.) scdspeed/Vehicle Dynamics/w = T//J w0 = 209 rad//s
209.48 false true -Inf Inf -Inf Inf
Inputs:
----------
u Known Min Max
_____ _____ _____ _____
(1.) scdspeed/Throttle perturbation
0 false -Inf Inf
Outputs:
----------
y Known Min Max
_____ _____ _____ _____
(1.) scdspeed/rad//s to rpm
4000 true -Inf Inf
Search for operating points that meet these specifications using the findop function.
opt = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,opt);
View the resulting operating point for the third operating condition.
op(3)
ans =
Operating point for the Model scdspeed.
(Time-Varying Components Evaluated at time t=0)
States:
----------
x
_______
(1.) scdspeed/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
0.4731
(2.) scdspeed/Vehicle Dynamics/w = T//J w0 = 209 rad//s
418.879
Inputs:
----------
u
______
(1.) scdspeed/Throttle perturbation
5.8292
Linearize Model
To linearize the model, first specify the linearization input points at the outputs of the throttle and Spark Advance blocks.
io(1) = linio('scdspeed/throttle (degrees)',1,'input'); io(2) = linio('scdspeed/Spark Advance',1,'input');
Next, specify the linearization output point at the output of the rad/s to rpm block.
io(3) = linio('scdspeed/rad//s to rpm',1,'output');
Linearize the model for each of the operating conditions.
sys = linearize(mdl,op,io);
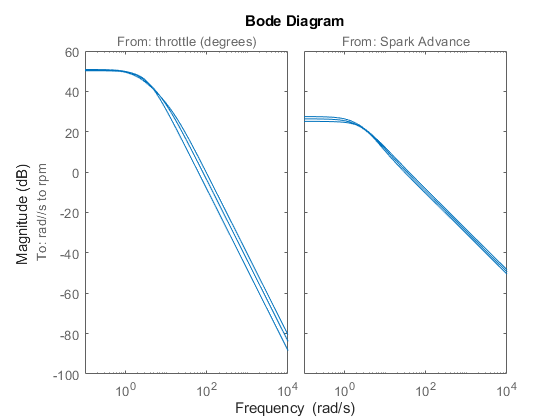
Plot the Bode magnitude response for the resulting linear models.
bodemag(sys)
Close the model.
bdclose(mdl)
See Also
operspec | findop | linio | linearize
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)